Automatisation
En Vedette
Nouvelles générales
Une main robotique imprimée en 3D
Capable de saisir des objets différentes tailles
mai 5, 2023
par GC Staff
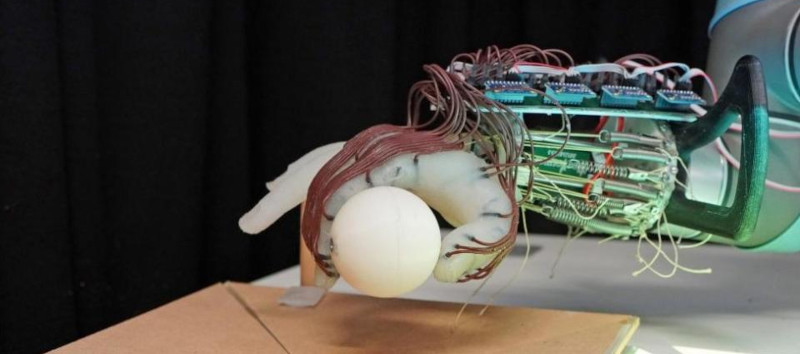 (Crédit photo : University of Cambridge)
(Crédit photo : University of Cambridge) Saisir des objets de différentes tailles, formes et textures est un problème facile pour un humain, mais difficile pour un robot. Des chercheurs de l’Université de Cambridge ont conçu une main robotique douce en 3D qui ne peut pas bouger ses doigts de manière indépendante, mais peut effectuer une gamme de mouvements complexes.
Dans le monde naturel, le mouvement résulte de l’interaction entre le cerveau et le corps : cela permet aux personnes et aux animaux de se déplacer de manière complexe sans dépenser des quantités inutiles d’énergie. Au cours des dernières années, les composants souples ont commencé à être intégrés dans la conception robotique grâce aux progrès des techniques d’impression 3D, qui ont permis aux chercheurs d’ajouter de la complexité à des systèmes simples et écoénergétiques.
La main humaine est très complexe, et recréer toute sa dextérité et son adaptabilité dans un robot est un énorme défi de recherche. La plupart des robots avancés d’aujourd’hui ne sont pas capables de manipuler des tâches que les petits enfants peuvent effectuer facilement. Par exemple, les humains savent instinctivement combien de force utiliser lorsqu’ils ramassent un œuf, mais pour un robot, c’est un défi : trop de force, et l’œuf pourrait se briser ; trop peu, et le robot pourrait le laisser tomber. De plus, une main de robot entièrement actionnée, avec des moteurs pour chaque articulation de chaque doigt, nécessite une quantité importante d’énergie.
Les chercheurs l’Université de Cambridge ont utilisé une main anthropomorphe imprimée en 3D implantée avec des capteurs tactiles, afin que la main puisse sentir ce qu’elle touchait.
L’équipe a effectué plus de 1 200 tests avec la main du robot, observant sa capacité à saisir de petits objets sans les laisser tomber. Le robot a d’abord été entraîné à l’aide de petites billes en plastique imprimées en 3D et les a saisies à l’aide d’une action prédéfinie obtenue grâce à des démonstrations humaines.
Le robot a utilisé des essais et des erreurs pour apprendre quel type de prise serait efficace. Après avoir terminé l’entraînement avec les balles, il a ensuite tenté de saisir différents objets, y compris une pêche, une souris d’ordinateur et un rouleau de papier bulle. Dans ces tests, la main a réussi à saisir 11 des 14 objets qui lui ont été présentés.
La conception passive de la main conçue par Cambridge, utilisant un petit nombre de capteurs, est plus facile à contrôler, offre une large amplitude de mouvement et rationalise le processus d’apprentissage.
À l’avenir, le système pourrait être étendu de plusieurs manières, par exemple en ajoutant des capacités de vision par ordinateur ou en apprenant au robot à exploiter son environnement, ce qui lui permettrait de saisir un plus large éventail d’objets.
https://www.cam.ac.uk
Print this page