Les progrès rapides qu’ont connus récemment les robots biohybrides comportant des tissus musculaires squelettiques formés sur un substrat flexible ont donné lieu à différents types de locomotion alimentés par de tels tissus musculaires. Cependant, il semble difficile d’atteindre des niveaux élevés d’actionnements à long terme des tissus musculaires squelettiques en raison de leur rétrécissement spontané au cours de la culture tissulaire. La faible force des muscles et leur tout aussi faible durée de vie constituaient jusqu’à tout récemment des obstacles de taille.
Résoudre ces problèmes permettrait sans doute d’utiliser de tels robots pour améliorer la transplantation d’organes ou l’ajout de prothèses, une perspective que laisse entrevoir une étude réalisée conjointement par Yuya Morimoto (Institute of Industrial Science, University of Tokyo), Hiroaki Onoe (Department of Mechanical Engineering, Keio University, Yokohama) et Shoji Takeuchi (International Research Center for Neurointelligence, University of Tokyo Institutes for Advanced Study).
Dans un article sur le sujet paru dans la revue Science Robotics du 31 mai dernier (« Biohybrid robot powered by an antagonistic pair of skeletal muscle tissues »), ceux-ci indique que : « Pour surmonter cette limitation, nous avons adapté le concept de systèmes biologiques et développé un robot biohybride actionné par une paire antagoniste de tissus musculaires squelettiques. Notre robot a réalisé un grand actionnement (~90 ° de rotation d’une articulation) par des contractions sélectives des tissus musculaires squelettiques et une longue durée de vie (~1 semaine) en équilibrant les tensions des tissus antagonistes pour prévenir le rétrécissement spontané. Notre recherche peut fournir une plate-forme pour dépasser les limites de conception dans les robots biohybrides classiques et reproduire divers mouvements réalistes ».
Pour parvenir à créer un robot biohybride capable de déplacer des objets de faible poids, ces chercheurs ont cultivé sur des feuilles d’hydrogel des myoblastes, soit des cellules souches à l’origine de la formation des muscles de rats. « Une fois que nous avions construit les muscles, nous avons réussi à les utiliser au sein du robot comme une paire antagoniste, avec un muscle qui contracte et l’autre qui étire, tout comme dans le corps », indique Shoji Takeuchi.
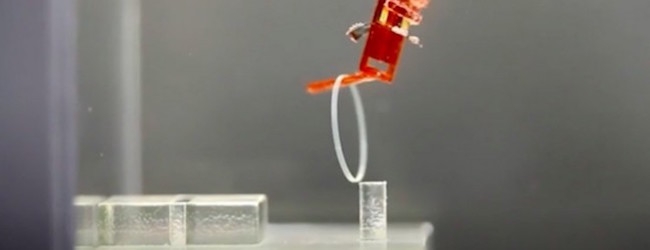
Le fonctionnement des muscles en directions opposées, sollicités par des impulsions électriques d’électrodes, leur a donné la robustesse nécessaire pour ramasser et déplacer un anneau, par exemple. Tout autant, en associant deux robots, les chercheurs ont pu leur faire soulever ensemble un objet carré de faible dimension.
« Nos résultats montrent qu’en utilisant cette disposition antagoniste des muscles, nos robots peuvent imiter les actions d’un doigt humain, déclare Yuya Morimoto. Si nous pouvons combiner plusieurs de ces muscles dans un seul appareil, nous devrions être capables de reproduire l’interaction musculaire complexe qui permet aux mains, aux bras et à d’autres parties du corps de fonctionner ».
http://robotics.sciencemag.org/
Print this page